我国仿生手新突破:首次实现类人水平的自适应抓取
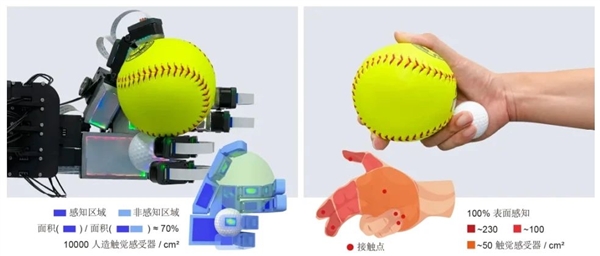
快科技6月23日消息,近日,《自然·机器智能》刊载北京通用人工智能研究院等团队成果F-TAC Hand。该仿生灵巧机器手在掌面70%区域集成高分辨率触觉感知,首次实现类人自适应抓取能力,标志中国在AI和机器人技术领域跻身前沿。人类手部功能复杂,是智能核心载体,拿取物体需“触觉反馈”与“运动功能”协同,以往整合二者是机器人研究关键挑战。
F-TAC Hand突破瓶颈,硬件上解决传感器影响运动灵活性及满足实际应用需求难题,软件上高效处理数据驱动关节协同运动。其设计灵感源于人手生物结构,17个高分辨率触觉传感器以6种配置集成,空间分辨率达0.1毫米,远超商用机器手。
实验表明,遇障碍时F-TAC Hand能在约100毫秒内切换策略,600次真实世界实验中,有触觉反馈时多物体抓取平均成功率从53.5%提升至100%。该成果有望推动机器人技术在医疗、工业等领域应用,为具身智能发展开辟新方向。
我国仿生手新突破:首次实现类人水平的自适应抓取
【本文结束】出处:快科技
<< 上一篇
下一篇 >>